TikZ
基础格式
%使用standalone格式
\documentclass[tikz,border=2pt]{standalone}
\begin{document}
\begin{tikzpicture}
\draw[step=1,color=gray!40] (-2,-2) grid (2,2);
\draw[->] (-3,0) -- (3,0);
\draw[->] (0,-3) -- (0,3);
\draw (0,0) circle (1);
\end{tikzpicture}
\end{document}
平移
% xshift ,x坐标轴平移。 yshift ,y坐标轴平移
% 注意xshift默认的单位并不是cm,如果要单位是cm需要写出来。
\begin{tikzpicture}
\draw[help lines] (0,0) grid (3,2);
\draw (0,0) -- (1,1);
\draw[red] (0,0) -- ([xshift=1cm] 1,1);
\end{tikzpicture}
旋转
% rotate旋转
\begin{tikzpicture}
\draw (0,0)[rotate=30] ellipse (2 and 1);
\end{tikzpicture}
变量定义
\newcommand\XA{2}
\coordinate (A) at (\XA,\YA);
正方形
\tikzstyle{matrix}=[rectangle,thick,minimum size=1cm,draw=gray!80,fill=gray!20]
\node (m1) [matrix] at (0,0) [align=center] {};
矩形
\tikzstyle{matrix}=[rectangle,thick,minimum width=4mm,minimum height=3mm,draw=gray!80,fill=gray!20]
\node (m1) [matrix] at (0,0) [align=center] {};
平行四边形
\tikzstyle{matrix}=[trapezium,
thick,minimum width=8cm,
minimum height=6cm,
trapezium left angle=110,
trapezium right angle=70,
draw=gray!80,
fill=gray!20,
fill opacity=.8]
字体大小
\tiny
\small
\normalsize
\large
\Large
\LARGE
\huge
\node(SpatialTemporalFusion1) [SpatialTemporalFusion] at (\BA, -3.5) {\normalsize Spatial-Temporal Fusion};
圆
\tikzstyle{cell}=[circle,fill=black!25,minimum size=25pt,inner sep=0pt]
\node (n1) [node] at (0,0) [align=center] {$node_1$};
透明度
%fill opacity=.4, draw opacity=1
\documentclass[tikz]{standalone}
\begin{document}
\begin{tikzpicture}[thick,fill opacity=.4,draw opacity=1]
\draw[fill=yellow] (-9,-8) rectangle (9,8);
\draw[fill=red] (-9,-6) rectangle (2,6);
\draw[fill=orange,dashed] (-3,-5) rectangle (9,5);
\draw[fill=green,dotted] (-3,-4) rectangle (5,4);
\draw[fill=blue] (-6,-2) rectangle (0,2);
\end{tikzpicture}
\end{document}
箭头
\tikzstyle{arrow} = [->,>=stealth,draw=red!20,thick]
\draw [arrow] (n1) -- (n5);
% 线上添加文字
\draw [arrow] (n2) -- node[below]{$S_{1,2}$}(n1);
输出eps图
pdftops -eps <pdf file> <eps file>
去除pdf空白区域
pdfcrop <pdf file>
node换行(必须有align关键字)
\node at (-0.5,1)[draw, align=center]{example \\ example example};
波浪线
\documentclass{article} % say
\usepackage{tikz}
\usetikzlibrary{arrows,snakes,backgrounds}
\begin{document}
\begin{tikzpicture}
\draw [->,snake=snake] (0,0) -- (2,0);
\end{tikzpicture}
\end{document}
添加文本
\documentclass{article}
\usepackage{tikz}
\begin{document}
\begin{tikzpicture}
\node[draw] at (0,0) {some text};
\node[draw,align=left] at (3,0) {some text\\ spanning three lines\\ with manual line breaks};
\node[draw,text width=4cm] at (2,-2) {some text spanning three lines with automatic line breaks};
\end{tikzpicture}
\end{document}
tikzset
\documentclass{standalone}
\usepackage{tikz}
\begin{document}
\pagestyle{empty}
\def\layersep{2.5cm}
\tikzset{
stations1/.pic ={
\tikzstyle{arrow} = [->,>=stealth,draw=red!50,thick]
\tikzstyle{arrow2} = [->,>=stealth,draw=red!80,thick]
\tikzstyle{arrow3} = [->,>=stealth,draw=red,thick]
\tikzstyle{node}=[circle,fill=black!25,minimum size=25pt,inner sep=0pt]
%\tikzstyle{matrix}=[rectangle,thick,minimum size=1cm,draw=gray!80,fill=gray!20]
%\tikzstyle{matrix}=[rectangle,thick,minimum width=8cm,minimum height=6cm,draw=gray!80,fill=gray!20,fill opacity=.8, align=right, text centered]
\tikzstyle{matrix}=[rectangle,thick,minimum width=8cm,minimum height=6cm,draw=gray!80,fill=gray!20,fill opacity=.8]
\node (m1) [matrix] at (0,0) [] {};
\node (n1) [node] at (0,0) [align=center] {$node_1$};
\node (n1) [node] at (0,0) [align=center] {$node_1$};
\node (n2) [node] at (-6,0) [align=center] {$node_2$};
\node (n3) [node] at (-5,5) [align=center] {$node_3$};
\node (n4) [node] at (-5,-5) [align=center] {$node_4$};
\node (n5) [node] at (0,-6) [align=center] {$node_5$};
\node (n6) [node] at (6,-6) [align=center] {$node_6$};
\node [draw,text width=4cm] at (4,6.5) {2021-1-16 12:00:00};
\draw [arrow3] (n1) -- (n5);
\draw [arrow3] (n1) -- (n6);
\draw [arrow2] (n3) -- (n1);
\draw [arrow3] (n2) -- (n1);
\draw [arrow] (n2) -- (n4);
},
}
\tikzset{
stations2/.pic ={
\tikzstyle{arrow} = [->,>=stealth,draw=red!50,thick]
\tikzstyle{arrow2} = [->,>=stealth,draw=red!80,thick]
\tikzstyle{arrow3} = [->,>=stealth,draw=red,thick]
\tikzstyle{node}=[circle,fill=black!25,minimum size=25pt,inner sep=0pt]
%\tikzstyle{matrix}=[rectangle,thick,minimum size=1cm,draw=gray!80,fill=gray!20]
%\tikzstyle{matrix}=[rectangle,thick,minimum width=8cm,minimum height=6cm,draw=gray!80,fill=gray!20,fill opacity=.8, align=right, text centered]
\tikzstyle{matrix}=[rectangle,thick,minimum width=8cm,minimum height=6cm,draw=gray!80,fill=gray!20,fill opacity=.8]
\node (m1) [matrix] at (0,0) [] {};
\node (n1) [node] at (0,0) [align=center] {$node_1$};
\node (n1) [node] at (0,0) [align=center] {$node_1$};
\node (n2) [node] at (-6,0) [align=center] {$node_2$};
\node (n3) [node] at (-5,5) [align=center] {$node_3$};
\node (n4) [node] at (-5,-5) [align=center] {$node_4$};
\node (n5) [node] at (0,-6) [align=center] {$node_5$};
\node (n6) [node] at (6,-6) [align=center] {$node_6$};
\node [draw,text width=4cm] at (4,6.5) {2021-1-16 8:00:00};
\draw [arrow3] (n1) -- (n5);
\draw [arrow3] (n1) -- (n6);
\draw [arrow2] (n3) -- (n1);
\draw [arrow3] (n2) -- (n1);
\draw [arrow] (n2) -- (n4);
},
}
\tikzset{
stations3/.pic ={
\tikzstyle{arrow} = [->,>=stealth,draw=red!50,thick]
\tikzstyle{arrow2} = [->,>=stealth,draw=red!80,thick]
\tikzstyle{arrow3} = [->,>=stealth,draw=red,thick]
\tikzstyle{node}=[circle,fill=black!25,minimum size=25pt,inner sep=0pt]
%\tikzstyle{matrix}=[rectangle,thick,minimum size=1cm,draw=gray!80,fill=gray!20]
%\tikzstyle{matrix}=[rectangle,thick,minimum width=8cm,minimum height=6cm,draw=gray!80,fill=gray!20,fill opacity=.8, align=right, text centered]
\tikzstyle{matrix}=[rectangle,thick,minimum width=8cm,minimum height=6cm,draw=gray!80,fill=gray!20,fill opacity=.8]
\node (m1) [matrix] at (0,0) [] {};
\node (n1) [node] at (0,0) [align=center] {$node_1$};
\node (n1) [node] at (0,0) [align=center] {$node_1$};
\node (n2) [node] at (-6,0) [align=center] {$node_2$};
\node (n3) [node] at (-5,5) [align=center] {$node_3$};
\node (n4) [node] at (-5,-5) [align=center] {$node_4$};
\node (n5) [node] at (0,-6) [align=center] {$node_5$};
\node (n6) [node] at (6,-6) [align=center] {$node_6$};
\node [draw,text width=4cm] at (4,6.5) {2021-1-16 04:00:00};
\draw [arrow3] (n1) -- (n5);
\draw [arrow3] (n1) -- (n6);
\draw [arrow2] (n3) -- (n1);
\draw [arrow3] (n2) -- (n1);
\draw [arrow] (n2) -- (n4);
},
}
\begin{tikzpicture}[scale=.4, font=\fontsize{12}{6}\selectfont]
\pic[scale=.4] at (0,0) {stations1};
\pic[scale=.4] at (2,-2) {stations2};
\pic[scale=.4] at (4,-4) {stations3};
\end{tikzpicture}
% End of code
\end{document}
数学符号
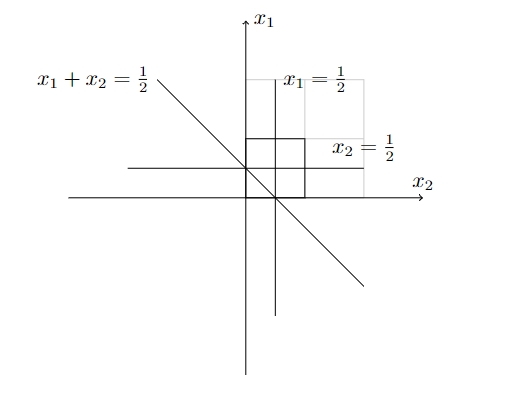
构建坐标系和添加函数
\begin{tikzpicture}
\draw[step=1,color=gray!40] (0,0) grid (2,2);
% 横坐标和纵坐标
\draw[->] (-3,0) -- (3,0) node[above] {$x_2$};
\draw[->] (0,-3) -- (0,3) node[right] {$x_1$};
\draw[draw=black] (0,0) rectangle (1, 1);
\draw[-] (2, -1.5) -- (-1.5,2) node[left,black] {$x_1+x_2=\frac{1}{2}$};
\draw[-] (-2, 0.5) -- (2,0.5) node[above,black] {$x_2=\frac{1}{2}$};
\draw[-] (0.5, -2) -- (0.5,2) node[right,black] {$x_1=\frac{1}{2}$};
\end{tikzpicture}
\end{document}
圆形
\draw (0,0) circle (1);
矩形
\draw[draw=black] (0,0) rectangle (1, 1);
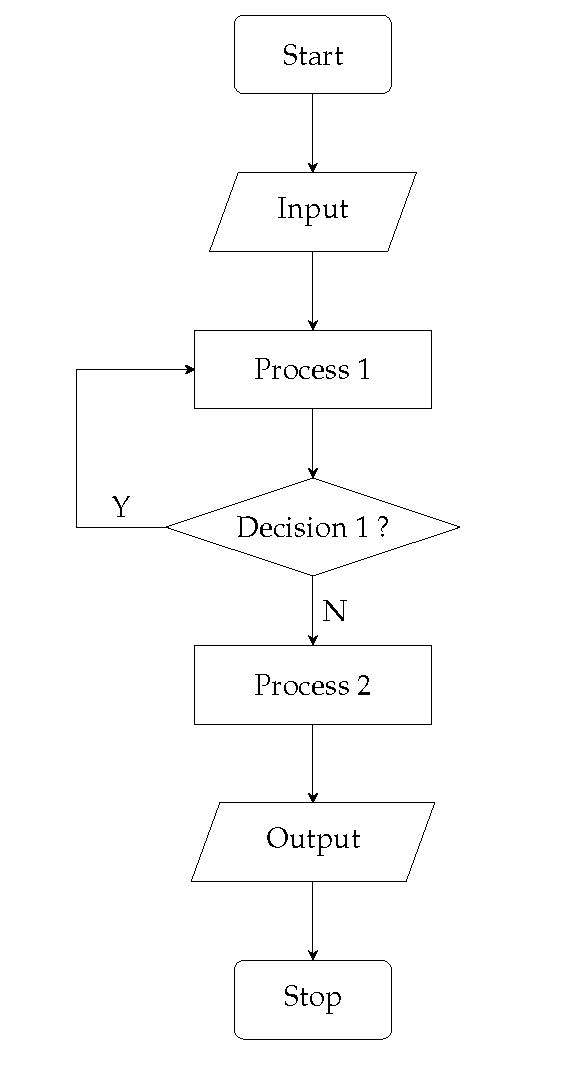
流程图
% texlive2015, pdflatex
\documentclass{article}
\usepackage{palatino}
\usepackage{tikz}
\usetikzlibrary{shapes.geometric, arrows}
\begin{document}
\thispagestyle{empty}
% 流程图定义基本形状
\tikzstyle{startstop} = [rectangle, rounded corners, minimum width = 2cm, minimum height=1cm,text centered, draw = black]
\tikzstyle{io} = [trapezium, trapezium left angle=70, trapezium right angle=110, minimum width=2cm, minimum height=1cm, text centered, draw=black]
\tikzstyle{process} = [rectangle, minimum width=3cm, minimum height=1cm, text centered, draw=black]
\tikzstyle{decision} = [diamond, aspect = 3, text centered, draw=black]
% 箭头形式
\tikzstyle{arrow} = [->,>=stealth]
\begin{tikzpicture}[node distance=2cm]
%定义流程图具体形状
\node[startstop](start){Start};
\node[io, below of = start, yshift = -1cm](in1){Input};
\node[process, below of = in1, yshift = -1cm](pro1){Process 1};
\node[decision, below of = pro1, yshift = -1cm](dec1){Decision 1 ?};
\node[process, below of = dec1, yshift = -1cm](pro2){Process 2};
\node[io, below of = pro2, yshift = -1cm](out1){Output};
\node[startstop, below of = out1, yshift = -1cm](stop){Stop};
\coordinate (point1) at (-3cm, -6cm);
%连接具体形状
\draw [arrow] (start) -- (in1);
\draw [arrow] (in1) -- (pro1);
\draw [arrow] (pro1) -- (dec1);
\draw (dec1) -- node [above] {Y} (point1);
\draw [arrow] (point1) |- (pro1);
\draw [arrow] (dec1) -- node [right] {N} (pro2);
\draw [arrow] (pro2) -- (out1);
\draw [arrow] (out1) -- (stop);
\end{tikzpicture}
\end{document}
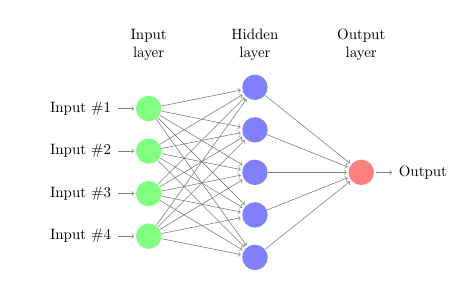
神经网络图
\documentclass{article}
\usepackage{tikz}
\begin{document}
\pagestyle{empty}
\def\layersep{2.5cm}
\begin{tikzpicture}[shorten >=1pt,->,draw=black!50, node distance=\layersep]
\tikzstyle{every pin edge}=[<-,shorten <=1pt]
\tikzstyle{neuron}=[circle,fill=black!25,minimum size=17pt,inner sep=0pt]
\tikzstyle{input neuron}=[neuron, fill=green!50];
\tikzstyle{output neuron}=[neuron, fill=red!50];
\tikzstyle{hidden neuron}=[neuron, fill=blue!50];
\tikzstyle{annot} = [text width=4em, text centered]
% Draw the input layer nodes
\foreach \name / \y in {1,...,4}
% This is the same as writing \foreach \name / \y in {1/1,2/2,3/3,4/4}
\node[input neuron, pin=left:Input \#\y] (I-\name) at (0,-\y) {};
% Draw the hidden layer nodes
\foreach \name / \y in {1,...,5}
\path[yshift=0.5cm]
node[hidden neuron] (H-\name) at (\layersep,-\y cm) {};
% Draw the output layer node
\node[output neuron,pin={[pin edge={->}]right:Output}, right of=H-3] (O) {};
% Connect every node in the input layer with every node in the
% hidden layer.
\foreach \source in {1,...,4}
\foreach \dest in {1,...,5}
\path (I-\source) edge (H-\dest);
% Connect every node in the hidden layer with the output layer
\foreach \source in {1,...,5}
\path (H-\source) edge (O);
% Annotate the layers
\node[annot,above of=H-1, node distance=1cm] (hl) {Hidden layer};
\node[annot,left of=hl] {Input layer};
\node[annot,right of=hl] {Output layer};
\end{tikzpicture}
% End of code
\end{document}
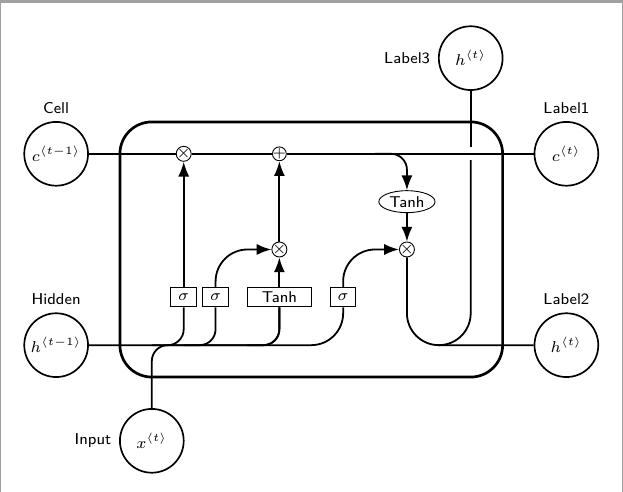
LSTM
\documentclass[tikz,border=10pt]{standalone}
\usepackage{tikz}
\usetikzlibrary{positioning, fit, arrows.meta, shapes}
\begin{document}
\begin{tikzpicture}[
font=\sf \scriptsize,
>=LaTeX,
cell/.style={
rectangle,
rounded corners=5mm,
draw,
very thick,
},
operator/.style={
circle,
draw,
inner sep=-0.5pt,
minimum height =.2cm,
},
function/.style={
ellipse,
draw,
inner sep=1pt
},
ct/.style={
circle,
draw,
line width = .75pt,
minimum width=1cm,
inner sep=1pt,
},
gt/.style={
rectangle,
draw,
minimum width=4mm,
minimum height=3mm,
inner sep=1pt
},
mylabel/.style={
font=\scriptsize\sffamily
},
ArrowC1/.style={
rounded corners=.25cm,
thick,
},
ArrowC2/.style={
rounded corners=.5cm,
thick,
},
]
%Start drawing the thing...
% Draw the cell:
\node [cell, minimum height =4cm, minimum width=6cm] at (0,0){};
% Draw inputs named ibox#
\node [gt] (ibox1) at (-2,-0.75) {$\sigma$};
\node [gt] (ibox2) at (-1.5,-0.75) {$\sigma$};
\node [gt, minimum width=1cm] (ibox3) at (-0.5,-0.75) {Tanh};
\node [gt] (ibox4) at (0.5,-0.75) {$\sigma$};
% Draw opérators named mux# , add# and func#
\node [operator] (mux1) at (-2,1.5) {$\times$};
\node [operator] (add1) at (-0.5,1.5) {+};
\node [operator] (mux2) at (-0.5,0) {$\times$};
\node [operator] (mux3) at (1.5,0) {$\times$};
\node [function] (func1) at (1.5,0.75) {Tanh};
% Draw External inputs? named as basis c,h,x
\node[ct, label={[mylabel]Cell}] (c) at (-4,1.5) {\empt{c}{t-1}};
\node[ct, label={[mylabel]Hidden}] (h) at (-4,-1.5) {\empt{h}{t-1}};
\node[ct, label={[mylabel]left:Input}] (x) at (-2.5,-3) {\empt{x}{t}};
% Draw External outputs? named as basis c2,h2,x2
\node[ct, label={[mylabel]Label1}] (c2) at (4,1.5) {\empt{c}{t}};
\node[ct, label={[mylabel]Label2}] (h2) at (4,-1.5) {\empt{h}{t}};
\node[ct, label={[mylabel]left:Label3}] (x2) at (2.5,3) {\empt{h}{t}};
% Start connecting all.
%Intersections and displacements are used.
% Drawing arrows
\draw [ArrowC1] (c) -- (mux1) -- (add1) -- (c2);
% Inputs
\draw [ArrowC2] (h) -| (ibox4);
\draw [ArrowC1] (h -| ibox1)++(-0.5,0) -| (ibox1);
\draw [ArrowC1] (h -| ibox2)++(-0.5,0) -| (ibox2);
\draw [ArrowC1] (h -| ibox3)++(-0.5,0) -| (ibox3);
\draw [ArrowC1] (x) -- (x |- h)-| (ibox3);
% Internal
\draw [->, ArrowC2] (ibox1) -- (mux1);
\draw [->, ArrowC2] (ibox2) |- (mux2);
\draw [->, ArrowC2] (ibox3) -- (mux2);
\draw [->, ArrowC2] (ibox4) |- (mux3);
\draw [->, ArrowC2] (mux2) -- (add1);
\draw [->, ArrowC1] (add1 -| func1)++(-0.5,0) -| (func1);
\draw [->, ArrowC2] (func1) -- (mux3);
%Outputs
\draw [-, ArrowC2] (mux3) |- (h2);
\draw (c2 -| x2) ++(0,-0.1) coordinate (i1);
\draw [-, ArrowC2] (h2 -| x2)++(-0.5,0) -| (i1);
\draw [-, ArrowC2] (i1)++(0,0.2) -- (x2);
\end{tikzpicture}
\end{document}
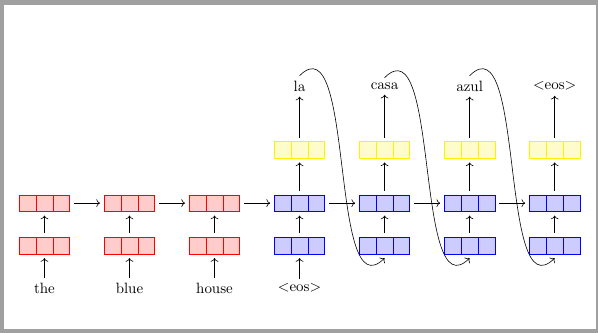
seq2seq
\documentclass[tikz,border=10pt]{standalone}
\usepackage{tikz}
\usetikzlibrary{positioning, fit, arrows.meta, shapes}
\begin{tikzpicture}[
hid/.style 2 args={
rectangle split,
rectangle split horizontal,
draw=#2,
rectangle split parts=#1,
fill=#2!20,
outer sep=1mm}]
% draw input nodes
\foreach \i [count=\step from 1] in {the,blue,house,}
\node (i\step) at (2*\step, -2) {\i};
% draw output nodes
\foreach \t [count=\step from 4] in {la,casa,azul,} {
\node[align=center] (o\step) at (2*\step, +2.75) {\t};
}
% draw embedding and hidden layers for text input
\foreach \step in {1,...,3} {
\node[hid={3}{red}] (h\step) at (2*\step, 0) {};
\node[hid={3}{red}] (e\step) at (2*\step, -1) {};
\draw[->] (i\step.north) -> (e\step.south);
\draw[->] (e\step.north) -> (h\step.south);
}
% draw embedding and hidden layers for label input
\foreach \step in {4,...,7} {
\node[hid={3}{yellow}] (s\step) at (2*\step, 1.25) {};
\node[hid={3}{blue}] (h\step) at (2*\step, 0) {};
\node[hid={3}{blue}] (e\step) at (2*\step, -1) {};
\draw[->] (e\step.north) -> (h\step.south);
\draw[->] (h\step.north) -> (s\step.south);
\draw[->] (s\step.north) -> (o\step.south);
}
% edge case: draw edge for special input token
\draw[->] (i4.north) -> (e4.south);
% draw recurrent links
\foreach \step in {1,...,6} {
\pgfmathtruncatemacro{\next}{add(\step,1)}
\draw[->] (h\step.east) -> (h\next.west);
}
% draw predicted-labels-as-inputs links
\foreach \step in {4,...,6} {
\pgfmathtruncatemacro{\next}{add(\step,1)}
\path (o\step.north) edge[->,out=45,in=225] (e\next.south);
}
\end{tikzpicture}
% End of code
\end{document}
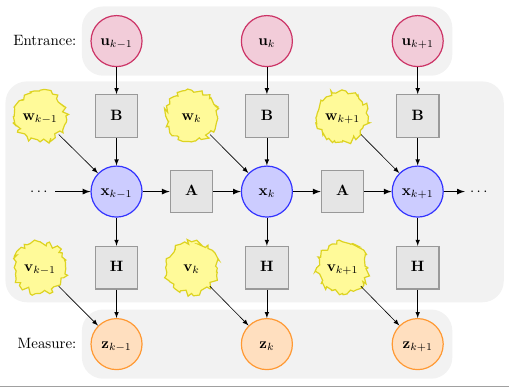
kalman-filter
\documentclass[a4paper,10pt]{article}
\usepackage[english]{babel}
\usepackage[T1]{fontenc}
\usepackage[ansinew]{inputenc}
\usepackage{lmodern} % font definition
\usepackage{amsmath} % math fonts
\usepackage{amsthm}
\usepackage{amsfonts}
\usepackage{tikz}
\usetikzlibrary{decorations.pathmorphing} % noisy shapes
\usetikzlibrary{fit} % fitting shapes to coordinates
\usetikzlibrary{backgrounds} % drawing the background after the foreground
\begin{document}
\begin{figure}[htbp]
\centering
% The state vector is represented by a blue circle.
% "minimum size" makes sure all circles have the same size
% independently of their contents.
\tikzstyle{state}=[circle,
thick,
minimum size=1.2cm,
draw=blue!80,
fill=blue!20]
% The measurement vector is represented by an orange circle.
\tikzstyle{measurement}=[circle,
thick,
minimum size=1.2cm,
draw=orange!80,
fill=orange!25]
% The control input vector is represented by a purple circle.
\tikzstyle{input}=[circle,
thick,
minimum size=1.2cm,
draw=purple!80,
fill=purple!20]
% The input, state transition, and measurement matrices
% are represented by gray squares.
% They have a smaller minimal size for aesthetic reasons.
\tikzstyle{matrx}=[rectangle,
thick,
minimum size=1cm,
draw=gray!80,
fill=gray!20]
% The system and measurement noise are represented by yellow
% circles with a "noisy" uneven circumference.
% This requires the TikZ library "decorations.pathmorphing".
\tikzstyle{noise}=[circle,
thick,
minimum size=1.2cm,
draw=yellow!85!black,
fill=yellow!40,
decorate,
decoration={random steps,
segment length=2pt,
amplitude=2pt}]
% Everything is drawn on underlying gray rectangles with
% rounded corners.
\tikzstyle{background}=[rectangle,
fill=gray!10,
inner sep=0.2cm,
rounded corners=5mm]
\begin{tikzpicture}[>=latex,text height=1.5ex,text depth=0.25ex]
% "text height" and "text depth" are required to vertically
% align the labels with and without indices.
% The various elements are conveniently placed using a matrix:
\matrix[row sep=0.5cm,column sep=0.5cm] {
% First line: Control input
&
\node (u_k-1) [input]{$\mathbf{u}_{k-1}$}; &
&
\node (u_k) [input]{$\mathbf{u}_k$}; &
&
\node (u_k+1) [input]{$\mathbf{u}_{k+1}$}; &
\\
% Second line: System noise & input matrix
\node (w_k-1) [noise] {$\mathbf{w}_{k-1}$}; &
\node (B_k-1) [matrx] {$\mathbf{B}$}; &
\node (w_k) [noise] {$\mathbf{w}_k$}; &
\node (B_k) [matrx] {$\mathbf{B}$}; &
\node (w_k+1) [noise] {$\mathbf{w}_{k+1}$}; &
\node (B_k+1) [matrx] {$\mathbf{B}$}; &
\\
% Third line: State & state transition matrix
\node (A_k-2) {$\cdots$}; &
\node (x_k-1) [state] {$\mathbf{x}_{k-1}$}; &
\node (A_k-1) [matrx] {$\mathbf{A}$}; &
\node (x_k) [state] {$\mathbf{x}_k$}; &
\node (A_k) [matrx] {$\mathbf{A}$}; &
\node (x_k+1) [state] {$\mathbf{x}_{k+1}$}; &
\node (A_k+1) {$\cdots$}; \\
% Fourth line: Measurement noise & measurement matrix
\node (v_k-1) [noise] {$\mathbf{v}_{k-1}$}; &
\node (H_k-1) [matrx] {$\mathbf{H}$}; &
\node (v_k) [noise] {$\mathbf{v}_k$}; &
\node (H_k) [matrx] {$\mathbf{H}$}; &
\node (v_k+1) [noise] {$\mathbf{v}_{k+1}$}; &
\node (H_k+1) [matrx] {$\mathbf{H}$}; &
\\
% Fifth line: Measurement
&
\node (z_k-1) [measurement] {$\mathbf{z}_{k-1}$}; &
&
\node (z_k) [measurement] {$\mathbf{z}_k$}; &
&
\node (z_k+1) [measurement] {$\mathbf{z}_{k+1}$}; &
\\
};
% The diagram elements are now connected through arrows:
\path[->]
(A_k-2) edge[thick] (x_k-1) % The main path between the
(x_k-1) edge[thick] (A_k-1) % states via the state
(A_k-1) edge[thick] (x_k) % transition matrices is
(x_k) edge[thick] (A_k) % accentuated.
(A_k) edge[thick] (x_k+1) % x -> A -> x -> A -> ...
(x_k+1) edge[thick] (A_k+1)
(x_k-1) edge (H_k-1) % Output path x -> H -> z
(H_k-1) edge (z_k-1)
(x_k) edge (H_k)
(H_k) edge (z_k)
(x_k+1) edge (H_k+1)
(H_k+1) edge (z_k+1)
(v_k-1) edge (z_k-1) % Output noise v -> z
(v_k) edge (z_k)
(v_k+1) edge (z_k+1)
(w_k-1) edge (x_k-1) % System noise w -> x
(w_k) edge (x_k)
(w_k+1) edge (x_k+1)
(u_k-1) edge (B_k-1) % Input path u -> B -> x
(B_k-1) edge (x_k-1)
(u_k) edge (B_k)
(B_k) edge (x_k)
(u_k+1) edge (B_k+1)
(B_k+1) edge (x_k+1)
;
% Now that the diagram has been drawn, background rectangles
% can be fitted to its elements. This requires the TikZ
% libraries "fit" and "background".
% Control input and measurement are labeled. These labels have
% not been translated to English as "Measurement" instead of
% "Messung" would not look good due to it being too long a word.
\begin{pgfonlayer}{background}
\node [background,
fit=(u_k-1) (u_k+1),
label=left:Entrance:] {};
\node [background,
fit=(w_k-1) (v_k-1) (A_k+1)] {};
\node [background,
fit=(z_k-1) (z_k+1),
label=left:Measure:] {};
\end{pgfonlayer}
\end{tikzpicture}
\caption{Kalman filter system model}
\end{figure}
\end{document}
重复元素
\documentclass{standalone}
\usepackage{tikz}
\begin{document}
\pagestyle{empty}
\def\layersep{10cm}
\tikzset{
stations/.pic={
\tikzstyle{arrow} = [->,>=stealth,draw=red!20,thick]
\tikzstyle{arrow2} = [->,>=stealth,draw=red!50,thick]
\tikzstyle{arrow3} = [->,>=stealth,draw=red,thick]
\tikzstyle{node}=[circle,fill=black!25,minimum size=25pt,inner sep=0pt]
\node (n1) [node] at (0,0) [align=center] {$node_1$};
\node (n2) [node] at (-6,0) [align=center] {$node_2$};
\node (n3) [node] at (-5,5) [align=center] {$node_3$};
\node (n4) [node] at (-5,-5) [align=center] {$node_4$};
\node (n5) [node] at (0,-6) [align=center] {$node_5$};
\node (n6) [node] at (6,-6) [align=center] {$node_6$};
\draw [arrow3] (n1) -- (n5);
\draw [arrow3] (n1) -- (n6);
\draw [arrow2] (n3) -- (n1);
\draw [arrow3] (n2) -- (n1);
\draw [arrow] (n2) -- (n4);
},
}
\begin{tikzpicture}[scale=.4, font=\fontsize{12}{6}\selectfont]
\pic[draw=blue] at (-1,1) {stations};
\pic (stations) at (0,0) {stations};
\end{tikzpicture}
% End of code
\end{document}
时间序列
timeseries.dat
t x y z
1 2 3 7
2 1 2 8
3 0 0 8
4 2 0 10
5 3 0 11
6 2 -1 12
7 2 -1 12
8 2 -1 13
9 -1 -1 13
10 -2 -2 13
11 -4 -2 13
12 -4 -2 12
13 -5 -2 12
14 -5 -2 11
15 -5 -2 11
16 -6 -2 11
17 -6 -3 10
18 -6 -3 9
19 -5 -3 8
20 -5 -3 7
21 -5 -3 6
22 -4 -3 6
23 -2 -3 5
24 -2 -3 5
25 -2 -4 6
26 -1 -4 5
27 0 -3 5
28 1 -3 6
29 1 -3 6
30 1 -3 6
31 2 -3 7
32 2 -3 7
33 2 -3 7
34 2 -3 8
35 3 -2 8
36 2 -2 9
37 2 -3 10
38 3 -2 10
39 3 -2 11
40 1 -2 11
41 2 -2 11
42 2 -1 12
43 2 -1 12
44 2 -1 12
45 2 -1 12
46 1 -1 12
47 -1 -1 12
48 -1 -1 12
49 -1 -1 12
50 -2 -1 11
51 -3 -2 11
52 -3 -2 11
plot time dat
\documentclass{article}
\usepackage{pgfplots}
\pgfplotsset{compat=1.11}
\begin{document}
\begin{tikzpicture}
\begin{axis}[xlabel=time, ylabel=accel, legend pos=outer north east]
\addplot[blue, mark=none] table[x=t, y=x] {timeseries.dat};
\addlegendentry{x}
\addplot[red, mark=none] table[x=t, y=y] {timeseries.dat};
\addlegendentry{y}
\addplot[green, mark=none] table[x=t,y=z] {timeseries.dat};
\addlegendentry{z}
\end{axis}
\end{tikzpicture}
\end{document}
plot time_series
\documentclass{article}
\usepackage{pgfplots}
\pgfplotsset{compat=1.14}
\begin{document}
\begin{tikzpicture}[scale=0.75]
\begin{axis}[height=7cm, width=12cm, xlabel=Time, ylabel=DO, legend pos=outer north east, xtick={1, 2, 3, 4, 5, 6, 7, 8, 9},xticklabels={$T-5$, $T-4$, $T-3$, $T-2$, $T-1$, $T$, $T+1$, $T+2$, $T+3$}]
% \addplot[color=blue, mark=square,] table[x=t, y=node1]{
% t node1
% 1 2
% 2 1
% 3 0
% 4 2
% 5 3
% 6 2
% 7 4
% };
\addplot[color=blue, mark=square,] table[y=node1]{
t node1
1 2
2 1
3 0
4 2
5 3
6 2
};
\addlegendentry{node1}
\addplot[color=blue, mark=*, dashed] table[x=t, y=node1]{
t node1
6 2
7 5
8 6
9 2
};
\addlegendentry{node1 prediction}
\addplot[red, mark=square] table[x=t, y=node2]
{
t node2
1 3
2 2
3 1
4 4
5 3
6 5
};
\addlegendentry{node2}
\addplot[color=green, mark=square,] table[x=t, y=node3]{
t node3
1 7
2 8
3 8
4 9
5 10
6 8
};
\addlegendentry{node3}
\end{axis}
\end{tikzpicture}
\end{document}